返回 智元机器人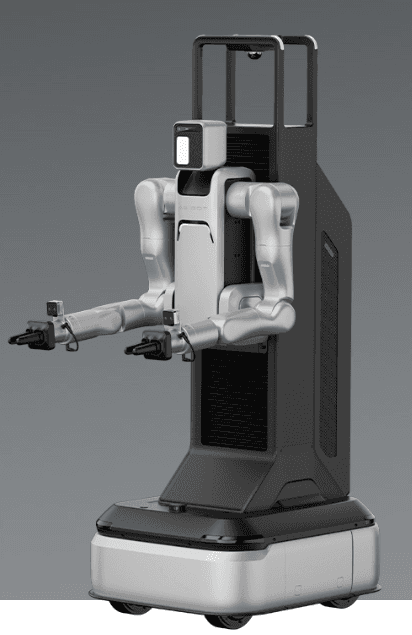
远征A2-W 柔性智造机器人
Expedition A2-W
规模量产轮式2024
运动方式
轮式
高度
163 cm
自由度
40 DOF
手部自由度
2 DOF
体重
230 kg
双臂负载能力
10 kg
续航时间
5 h
算力
Jetson AGX Orin 64GB 275 TOPS
传感器配置
360°激光雷达+4颗AI视觉传感器+2颗六维力觉传感器
阶段
规模量产
2024 年发布
2024
产品概述
柔性智造专家,打造一站式解决方案 双臂协作,全域可达 仿生七自由度双臂,支持并行及异步作业,可空中接力与换手,轻松应对复杂工件和特定位姿操作。 四轮四驱,支持零回转半径与蟹行,腰部可升降与俯仰,22自由度全方位覆盖人类作业空间。 高效部署,柔性作业 底盘、手臂、感知系统一体式设计,支持天级安装调试部署时间。 基于UniGrasp、Uni6DPose、UniPlug等具身原子能力及275T算力,能实现毫秒级实时对象识别、位姿估计及操作决策,动态适配柔性作业环境。 通过3D模型合成训练+强化学习,操作对象更换最快可缩短至小时级。 模型进化,持续演进 原子能力模块化设计,可OTA迭代升级;作业技能库可持续拓展,越用越丰富。 具身算法可通过数据采集及训练不断优化,越用越智能,越用越高效。 采训推一体化设计,支持高效数据采集、仿真训练和推理部署。 多模感知,安全无忧 360°激光雷达+4颗AI视觉传感器+2颗六维力觉传感器等多传感器融合感知,实现毫秒级感知与智能避障。 手臂碰撞检测系统+360°环境实时感知+感知控制多路冗余设计,确保人员与环境安全。 持久作业,极简维护 支持热插拔换电,分钟级补能时间,支持自主充电,减少人工干预。内置任务实时自诊断与自恢复机制,减少非计划停机时间与维护投入
核心亮点
柔性智造专家,打造一站式解决方案
双臂协作,全域可达
仿生七自由度双臂,支持并行及异步作业,可空中接力与换手,轻松应对复杂工件和特定位姿操作。
四轮四驱,支持零回转半径与蟹行,腰部可升降与俯仰,22自由度全方位覆盖人类作业空间。
高效部署,柔性作业
底盘、手臂、感知系统一体式设计,支持天级安装调试部署时间。
基于UniGrasp、Uni6DPose、UniPlug等具身原子能力及275T算力,能实现毫秒级实时对象识别、位姿估计及操作决策,动态适配柔性作业环境。
通过3D模型合成训练+强化学习,操作对象更换最快可缩短至小时级。
模型进化,持续演进
原子能力模块化设计,可OTA迭代升级;作业技能库可持续拓展,越用越丰富。
具身算法可通过数据采集及训练不断优化,越用越智能,越用越高效。
采训推一体化设计,支持高效数据采集、仿真训练和推理部署。
多模感知,安全无忧
360°激光雷达+4颗AI视觉传感器+2颗六维力觉传感器等多传感器融合感知,实现毫秒级感知与智能避障。
手臂碰撞检测系统+360°环境实时感知+感知控制多路冗余设计,确保人员与环境安全。
持久作业,极简维护
支持热插拔换电,分钟级补能时间,支持自主充电,减少人工干预。内置任务实时自诊断与自恢复机制,减少非计划停机时间与维护投入
目标场景
智元远征A2-W轮式通用机器人专为柔性智造场景打造具备抓取放置搬运插接等多种能力自研具身智能算法并开放接口提供工具方便二次开发。远征A2-W作业技能通过数据积累可不断优化越用越智能越用越高效。远征A2-W还拥有仿生双臂设计高精度力控多个深度与视觉传感器及四轮四驱系统确保在复杂环境中稳定灵活高效安全的作业;全身一体化设计实现开箱即用的便捷部署;支持热插拔换电减少补能时间。远征A2-W可应用于上下料端子插接物流转运等场景是提升产线自动化水平实现柔性生产的理想选择。